
Let me kill a myth right now: the sticker price on a drone thermal camera is not the cost of the system. Not even close.
Every month, someone in a procurement meeting waves around a spec sheet and announces they’ve found a “budget thermal solution” for search and rescue or infrastructure inspection. They’ve bought a $400 single-band radiometric camera, slapped it under a mid-tier commercial drone, and called it a day. Six months later, that same team is back, asking why their operators can’t identify targets beyond 300 meters, why they’re running two separate payloads and still missing data, and why their post-processing pipeline is a mess of misaligned visible and thermal frames.
The real cost of a drone thermal camera system isn’t just the sensor. It’s the integration cost, the operational overhead, and—most critically—the capability gap you pay for every time the hardware can’t do the job.
The Myth of the “Good Enough” Single-Sensor Payload
The industry perpetuated this idea for years: buy a thermal camera, mount it, done. It was never really true, and it’s even less true now.
Here’s the engineering problem. Thermal sensors are exceptional at detecting that something exists—a heat signature, an anomaly, a person in the dark. They are lousy at telling you what it is, where exactly it is, and how far away it is. That last part is the one that kills operational efficiency. A 640×512 thermal sensor running 8–14 μm will show you a warm blob at 800 meters. It will not tell you if that blob is a lost hiker, a generator, or a warm rock face. Without a concurrent visible-light image and a distance reference, your operator is guessing.
The legacy approach was to fly two payloads, or switch configurations between missions. The weight penalty is real, the gimbal complexity doubles, and the data synchronization between thermal and RGB streams is, frankly, a headache I do not miss.
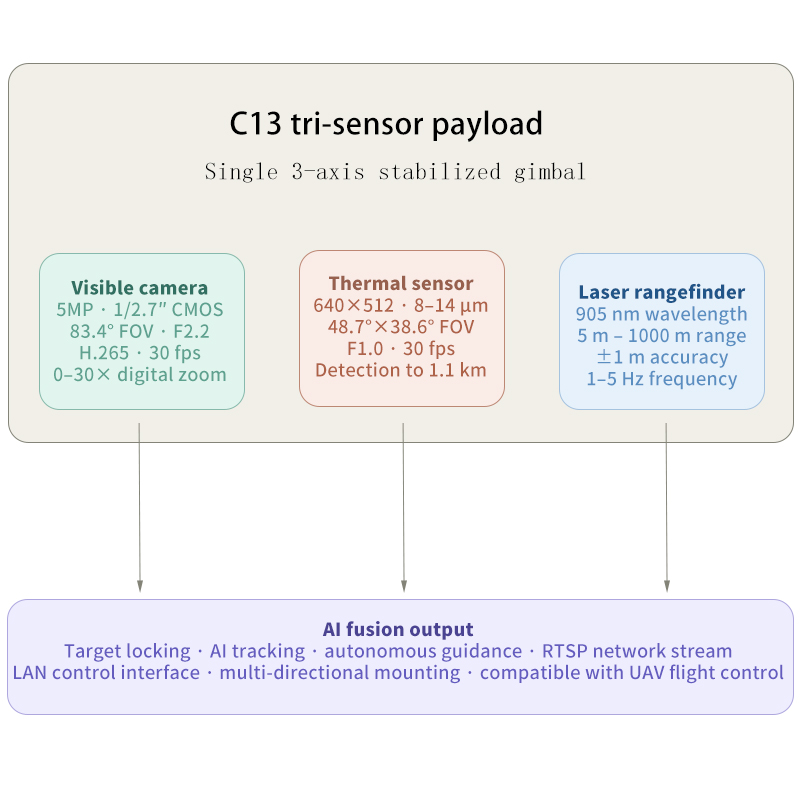
So when a tri-sensor system like the C13 Thermal Gimbal Camera arrives on the market integrating a 5MP visible camera, a 640×512 thermal sensor, and a 905nm laser rangefinder into a single 3-axis stabilized payload, the correct engineering response is: that’s the right approach. Not because it’s clever marketing, but because it solves an actual field problem.
Let me dig into why each of those three sensors matters—and why their integration justifies the price point.
What a 640×512 Thermal Sensor Actually Buys You
The resolution numbers matter more than most buyers understand. The older generation of “budget” thermal payloads runs 320×240. That’s 76,800 pixels of thermal data. A 640×512 sensor gives you 327,680 pixels—four times the thermal spatial resolution.
In practice, that’s the difference between a smeared heat blob at 600 meters and a discernible human silhouette with enough edge definition to confirm posture. For search and rescue operations in dense terrain, that resolution delta is operationally critical.
Detection range of up to approximately 1.1 km for the C13’s thermal sensor is a meaningful number, though it deserves a caveat: detection is not identification. At 1.1 km you’re detecting a heat source. At closer range—200 to 400 meters—the 640×512 resolution combined with 30× electronic zoom on the visible channel gives you the identification capability. This is why the sensor fusion matters. Thermal detects; visible identifies.
The 8–14 μm spectral range is standard LWIR (long-wave infrared). It’s the right band for most field applications—good penetration through smoke and light haze, excellent sensitivity to human and vehicle thermal signatures at ambient temperatures. Anyone selling you an MWIR sensor for a general-purpose inspection drone is charging you for capability you probably don’t need.
The Laser Rangefinder: Underappreciated and Underdiscussed
This is the component that separates professional-grade payloads from everything else, and buyers routinely ignore it.
The C13 integrates a 905nm laser rangefinder with a measurement range of 5 meters to 1000 meters at ±1m accuracy and a 1–5 Hz update rate. Here’s the practical implication: your drone knows exactly how far away the target is. Not estimated via GPS comparison. Not calculated from barometric altitude with a terrain model lookup. Measured directly.
This has two major operational benefits. First, it enables accurate real-world coordinates for detected targets. Pair the LiDAR range reading with GPS position and gimbal angle data, and you can calculate ground-truth coordinates for a thermal anomaly with meter-level accuracy. For infrastructure inspection—particularly power line corridors and pipeline routes—this transforms your output from “there’s something hot over there” into actionable GIS data.
Second, it makes the AI target tracking actually reliable. Tracking algorithms that operate without range data are working with 2D projections of a 3D world. Range data locks the tracking geometry. The C13’s AI target locking and autonomous guidance capability only makes engineering sense because the rangefinder is feeding real-world distance into the tracking pipeline.
On the AI Functions: What to Expect, What Not to Assume
The marketing language around “AI-powered tracking” deserves some engineer-style scrutiny. AI target locking on a gimbal payload means the system uses machine vision to identify a moving target in the image frame and commands the gimbal to keep the target centered. This is real and useful. It reduces operator fatigue significantly on extended surveillance operations.
What it doesn’t mean: fully autonomous mission execution without oversight, or detection capability that exceeds the physical limits of the underlying sensors. The AI is only as good as the image data feeding it. At 1 km with heavy smoke, the thermal image degrades. The AI degrades with it.
The autonomous guidance capability—pairing the C13 with compatible flight controllers for AI-directed flight path adjustments—is conditionally useful. For a team running standardized inspection routes on familiar infrastructure, it’s a genuine efficiency multiplier. For dynamic search and rescue with variable terrain, an experienced operator will outperform it. Know your use case before you weight this feature heavily.
The Actual Price of a Drone Thermal Camera System
Here’s the number that matters. The hardware cost—the payload itself—is one line item. Factor in UAV platform compatibility, integration with a flight controller that supports the LAN control interface, operator training time, and data management infrastructure for RTSP network streams. A tri-sensor system like the C13 concentrates three instruments, a stabilized gimbal, and an AI compute layer into a single payload with a single mounting point and a single network interface. That consolidation has real dollar value.
Compare that architecture against the alternative: a separate thermal camera, a separate EO camera, a separate rangefinder module if you even bother, and the software stack to synchronize three data streams. The single-payload approach isn’t just cleaner engineering. It’s cheaper total system cost when you run the full analysis.
When it comes to the cost of drones equipped with thermal imaging cameras, the issue isn’t really about the camera itself, but rather the specific problem you’re trying to solve—and what you’ll do when the hardware can’t solve it.